Fiche pédagogique n° 02b:
Comment calculer les circonstances locales d’un
passage
de Vénus devant le Soleil.
P. Rocher (IMCCE)
I. Positions des astres par rapport au centre de la Terre.
La position d’un corps céleste dans l’espace est connue lorsque l’on connaît ses coordonnées dans un repère tridimensionnel orthonormé que l’on s’est fixé. La première chose à définir est donc ce repère tridimensionnel. Pour cela il faut définir trois directions orthogonales particulières définissant trois axes Ox, Oy, Oz et une origine O. On pourrait prendre des directions quelconques, mais il est judicieux de choisir des directions particulières qui varient le moins possible par rapport au globe terrestre. C’est pourquoi on prend comme direction de l’axe Oz la direction de l’axe de rotation de la Terre sur elle-même (direction du pôle céleste). Le plan normal à cette direction (plan Oxy) est un plan parallèle à l’équateur terrestre. Dans ce plan on choisit également une direction Ox particulière qui bouge le moins possible au cours du temps. On choisit la direction de l’équinoxe de printemps intersection du plan de l’équateur terrestre et du plan orbital de la Terre (plan de l’écliptique). En fait, ce trièdre n’est pas totalement fixe car l’axe de rotation de la Terre est animé de petits mouvements. Mais à chaque instant on peut définir un repère instantané qui porte le nom de repère équatorial vrai. Ce repère peut être centré sur le centre de notre choix, si c’est le Soleil, le repère est dit héliocentrique, si c’est le centre de la Terre le repère est dit géocentrique et si c’est un lieu quelconque sur la Terre le repère est dit topocentrique.
Dans un repère cartésien, la position de chaque corps du système solaire est connu grâce à ses coordonnées cartésiennes (x,y,z). En réalité les astronomes mesurent plutôt des angles que des distances ; c’est pourquoi, parallèlement aux coordonnées cartésiennes ils utilisent également un système de coordonnées polaires construit à partir du même repère. Ce système de coordonnées comportent trois coordonnées, une longueur (D) et deux angles (a et d). La longueur ou rayon vecteur est la distance entre l’origine O du repère et le corps. L’angle a s’appelle l’ascension droite et est l’angle entre la projection orthogonale de la direction du corps dans le plan de l’équateur (Oxy) et l’axe Ox. Le second angle d s’appelle la déclinaison, c’est l’angle entre la direction de l’astre et sa projection orthogonale dans le plan Oxy, voir figure 1.
Lorsque l’on utilise uniquement les deux angles, tous les corps sont supposés être à la même distance (D = 1), ce système de coordonnées polaires porte alors le nom de sphère céleste.
Figure 1. – La sphère céleste équatoriale.
À chaque instant t les théories planétaires permettent de calculer les coordonnées cartésiennes apparentes géocentriques des planètes qui donnent la position apparente de chaque planète telle qu’elle est vue depuis le centre de la Terre. Ces coordonnées ne sont pas les positions géométriques des corps, elles tiennent compte de toutes les corrections et aberrations liées aux mouvements des corps et à la vitesse finie de la propagation de la lumière (nutation, précession, aberration planétaire et temps de lumière), seule la réfraction atmosphérique n’est pas prise en compte.
On passe d’un système de coordonnées à l’autre à l’aide des formules suivantes :
 et
et 
Soient a, d et D les coordonnées équatoriales apparentes géocentriques du Soleil, av, dv et Dv les coordonnées équatoriales apparentes géocentriques de Vénus, alors Da = av - a et Dd = dv- d. sont les coordonnées différentielles équatoriales sphériques de la planète par rapport au Soleil.
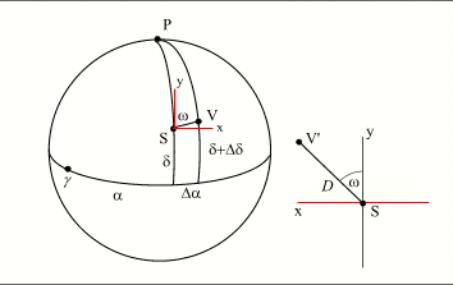
Figure 2. – Coordonnées différentielles.
Sur la sphère céleste équatoriale géocentrique, soit S le centre du Soleil et V le centre de Vénus. Si l’on appelle D l’angle entre S et V et w l’angle entre la direction du pôle et la direction SV compté dans le sens trigonométrique pour un observateur situé au centre de la sphère céleste géocentrique. Comme le système de coordonnées sphériques est direct, les axes rectangulaires, vus depuis le centre de la sphère sont orientés comme sur la figure 2. Le plan xSy est le plan tangent à la sphère céleste en S. V’ est la projection de V sur ce plan tangent, alors les coordonnées différentielles planes (X,Y) de SV’ sont données en radians par :
La distance SV’ entre le
centre du Soleil et le centre de Vénus dans le plan tangent est alors égale
à : ![]() .
.
Si l’on note d et d’ les demi-diamètres apparents du Soleil et de Vénus. Les instants t1 et t4 des contacts extérieurs géocentriques sont solutions de l’équation SV’=d + d’ et les instants t2 et t3 des contacts intérieurs géocentriques sont les solutions de l’équation SV’=d – d’. Ces calculs se font par approximations successives.
Les projections des demi-diamètres apparents de Vénus et du Soleil se calculent à partir des rayons rv et r de Vénus et du Soleil exprimés en kilomètres et des distances Dv et D de Vénus et du Soleil à la Terre par les formules suivantes :
![]() . et
. et ![]()
L’instant tm du
minimum de distance entre Vénus et le Soleil se calcule de même en calculant le
zéro de la fonction ![]() et la distance minimale
est donnée par la valeur de SV’ à cet instant.
et la distance minimale
est donnée par la valeur de SV’ à cet instant.
II. Le calcul des circonstances locales.
Figure 3. – Coordonnées géographiques.
La position d’un point M à la surface du globe terrestre est définie par ses coordonnées géographiques (figure 3) : sa latitude j par rapport à l’équateur et sa longitude l par rapport à un méridien origine (méridien de Greenwich). La Terre tourne autour de son axe d’un mouvement quasi uniforme en raison de un tour en 23h 56m 4s de temps universel (révolution sidérale de la Terre). Pour connaître à un instant t la position d’un observateur par rapport au repère Oxyz, il suffit de connaître à cet instant l’angle que fait le méridien de Greenwich avec la direction de l’axe Ox. Cette angle TG s’appelle le temps sidéral vrai à Greenwich à l’instant t. L’angle TL que fait le méridien du lieu d’observation M avec l’axe Ox au même instant, et qui porte le nom de temps sidéral local, est alors égal au temps sidéral vrai à Greenwich plus ou moins la longitude du lieu (en fonction de la position est ou ouest du lieu par rapport à Greenwich). Ainsi si les longitudes sont comptées positivement vers l’ouest et négativement vers l’est on a :
![]()
Alors les coordonnées cartésiennes du vecteur OM (x,h,z) du lieu dans le repère équatorial géocentrique vrai se calculent à l’aide des formules suivantes :
R étant le rayon terrestre.
Attention les unités utilisées doivent être cohérentes, si le coordonnées géocentriques sont exprimées en unités astronomiques, R doit également être en unités astronomiques, alors R est égal au rapport du rayon équatorial terrestre exprimé en kilomètres sur la valeur de l’unité astronomique exprimée également en kilomètres ; c’est donc aussi la valeur de la parallaxe horizontale équatoriale moyenne du Soleil exprimé en radians.
On peut raffiner le calcul en tenant compte de l’aplatissement terrestre f et de l’altitude h de l’observateur ; les formules deviennent alors :
avec
La hauteur h de l’observateur est exprimée dans la même unité que R.
Le calcul direct.
De nos jours, le calcul direct à l’aide d’un ordinateur ne pose aucun problème.
Pour cela il suffit de reprendre les formules utilisées pour le calcul géocentrique en remplaçant les coordonnées géocentriques par les coordonnées topocentriques. Les vecteurs positions topocentriques MV et MS joignant le point M au centre V de Vénus et au centre S du Soleil s’obtiennent par différences des vecteurs géocentriques correspondants et du vecteur OM joignant le centre de la Terre à l’observateur.
Le calcul approché.
La méthode approchée consiste à faire un certain nombre de
simplifications.
Comme Da, Dd et D sont de l’ordre du demi-diamètre solaire, on peut dans les équations donnant les coordonnées différentielles planes tangentielles X et Y négliger les quantités du troisième ordre sans introduire sur D et w des erreurs supérieures au centième de seconde. Ce qui permet de mettre la formule (1) sous la forme simplifiée suivante :
![]()
Le terme sin1" permet d’avoir les différentes coordonnées exprimées en secondes de degré, c’est la valeur en radians d’un angle de une seconde de degré. Si les valeurs Da et Dd sont en secondes de degré, on obtient les valeurs X et Y dans la même unité.
Calcul de la
parallaxe en coordonnées différentielles tangentielles
Notons les paramètres et coordonnées topocentriques avec un
indice p.
Les équations précédentes pour un lieu donné s’écrivent :
Dans les seconds termes de ces équations qui sont de l’ordre du carré du demi-diamètre solaire, on peut négliger la parallaxe, c’est-à-dire remplacer les coordonnées topocentriques par des coordonnées géocentriques, sans qu’il en résulte d’erreur atteignant un dixième de seconde dans les valeurs de Xp et Yp. Ce qui donne pour ces équations à ce degré d’appro-ximation :
De même si l’on prend la déclinaison géocentrique d du Soleil à la place de sa décli-naison topocentrique dans le calcul du cosinus du premier terme, l’erreur sera inférieure à 0,02".
Les équations ont donc la forme finale suivante :
et si l’on pose :
![]()
nous aurons :
U et V sont donc les expressions de la parallaxe en coordonnées différentielles tangentielles.
Nous allons faire apparaître dans
ces expressions les coordonnées cartésiennes de l’observateur. Si l’on désigne
de nouveau par ![]() , les coordonnées cartésiennes équatoriales du lieu
d’observation, à l’époque t, nous avons par les formules de la parallaxe
en coordonnées équatoriales :
, les coordonnées cartésiennes équatoriales du lieu
d’observation, à l’époque t, nous avons par les formules de la parallaxe
en coordonnées équatoriales :
Dans les deux dernières formules on peut remplacer les sinus et les cosinus de la déclinaison et de l’ascension droite de Vénus par ceux du Soleil sans commettre d’erreur supérieure à 0,2".
En substituant ces valeurs dans les expressions de U et V, et en posant :
![]()
nous trouvons :
or on a également par définition :
d’où l’on tire
d’où en négligeant le carré de la parallaxe solaire,
Les coordonnées équatoriales cartésiennes équatoriales de l’observateur en négligeant l’aplatissement terrestre sont les suivantes :
Où p0 est la valeur de la parallaxe horizontale équatoriale moyenne du Soleil exprimée en secondes de degré.
En substituant ces valeurs dans la formule (6) donnant U et V, on trouve :

Et en développant ces expressions et en regroupant les termes dépendant
uniquement du lieu on obtient l’expression suivante :
![]()
avec
Alors la formule (11) s’écrit sous la forme suivante :
![]()
Les coefficients a, b et c sont indépendants de
l’observateur, mais varient avec le temps, principalement à cause des
changements rapides que subissent les angles TG et w durant le passage.
On remarque également que l’on a la relation suivante :
![]()
Calcul des
instants de contacts topocentriques.
Nous allons utiliser les formules précédentes pour calculer les instants des contacts topocentriques à partir des instants des contacts géocentriques.
Si l’on affecte de l’indice 1 les paramètres des premiers contacts géocentriques, c’est à dire l’un des cas suivants :
Le premier
contact géocentrique extérieur : ![]()
ou le premier contact géocentrique intérieur : ![]()
t1 étant l’époque de ces contacts.
Pour un lieu
quelconque de latitude j et de longitude l l’époque du contact t1+Dt vérifie l’équation approchée
suivante :
r1 désignant la somme des demi-diamètres ou la différence des demi-diamètres en fonction du contact considéré.
En remarquant que ![]() et en négligeant les
carrés et les produits du second ordre, on trouve :
et en négligeant les
carrés et les produits du second ordre, on trouve :

ce qui s’écrit également
![]()
Mais on a également pour une époque t quelconque et pour le lieu M la relation :
![]()
On en déduit que :

Donc pour un point quelconque les instants des premiers contacts se calculent à l’aide de la formule suivante :

On peut faire un raisonnement identique pour les derniers contacts et l’on aura les formules suivantes, l’indice 2 correspondant aux derniers contacts.

et

Autres formulations.
On trouve également une formulation légèrement différente de ces deux
relations.
En remarquant que ![]() et que si l’on note
et que si l’on note ![]() la parallaxe de Vénus
et
la parallaxe de Vénus
et ![]() la parallaxe solaire
exprimées en secondes de degré ; R,D et
Dv doivent être exprimés en unités astronomiques, on a également
la parallaxe solaire
exprimées en secondes de degré ; R,D et
Dv doivent être exprimés en unités astronomiques, on a également ![]() donc :
donc :
L’expression Dt prend alors la forme
![]()
Et en intégrant ![]() dans les coefficients
a, b et c et en rappelant que X=D sinw
et que Y=D cosw et en
faisant apparaître la variable
dans les coefficients
a, b et c et en rappelant que X=D sinw
et que Y=D cosw et en
faisant apparaître la variable ![]() l'expression Dt devient
l'expression Dt devient
![]()
avec :
L’angle HG s’appelle l’angle horaire, c’est l’angle formé par la direction du méridien sud et la projection de la direction du corps (ici le Soleil) dans le plan équatorial (Oxy).
Pour calculer chaque contact du passage de Vénus en un lieu quelconque, il suffit de calculer les valeurs de ces trois coefficients pour chacun des contacts puis d’appliquer la relation précédente donnant le Dt pour chaque contact en chaque lieu considéré. Cette méthode est donc très rapide car elle ne nécessite que la connaissance de douze coefficients pour chaque passage de Vénus. Par contre sa précision n’est que de l’ordre du dixième de minute de temps, ce qui est suffisant pour prédire les instants des passages, mais est insuffisant si l’on désire réduire des observations et en déduire une valeur de la parallaxe solaire.